
Greetings!
Welcome to my personal page. I finished my PhD in the Group of Automation at the Chalmers University of Technology, supervised by Prof. Knut Åkesson. I’m currently working on cloud robotics with Prof. Ahmed Ali-Eldin Hassan. My research interests are in the area of robotics and machine learning, particularly in the development of integrated algorithms for predictive dynamic obstacle avoidance based on multimodal motion prediction. If you are interested in my work, feel free to contact me or raise an issue on the corresponding GitHub repository.
I sucessfully defended my thesis, “Future-Oriented Navigation for Autonomous Mobile Robots”, on May 15, 2025.
Active Work

Dynamic Nonconvex Obstacle Avoidance: One-shot Motion Prediction (EBM) and Control (On-Manifold CBF)
Under review (collaboration with GRASP lab, Univerisity of Pennsylvania) [Code (Not yet)] [Paper (Not yet)] [Video-Demo]
Not yet
Complex Obstacle Avoidance and Fleet Collision Avoidance: Sampling-based Trajectory Planning (DWA) Inspried by Gradient Field (GPDF)
IROS 2025 - Hangzhou, CN [Code] [Paper (arXiv)] [Video-Demo]
Gradient Field-Based Dynamic Window Approach for Collision Avoidance in Complex Environments | Non-convex obstacle avoidance | Multi-robot collision avoidance

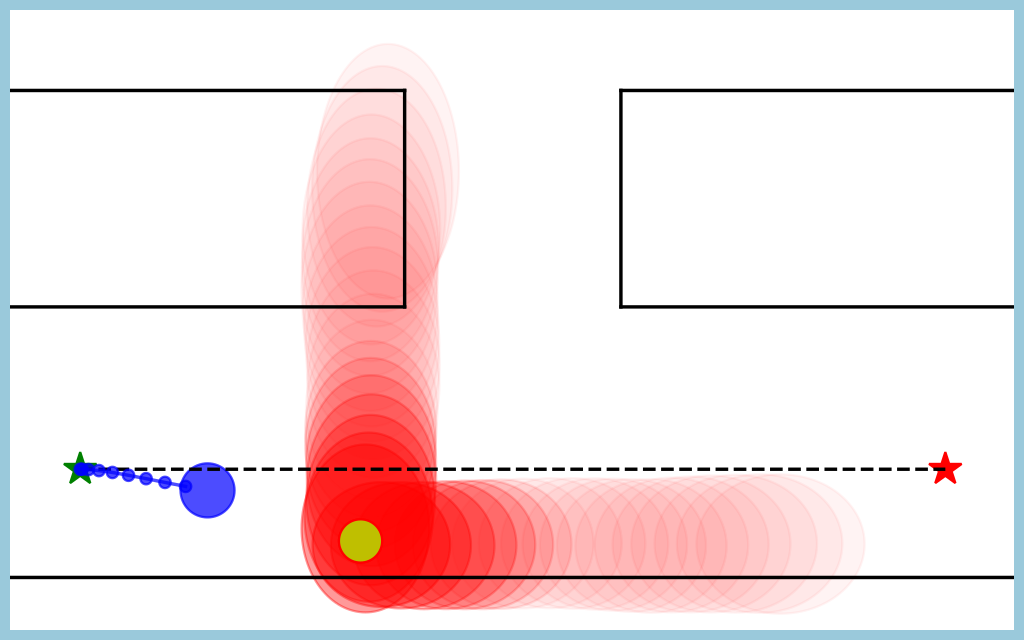
Dynamic Obstacle Avoidance: One-shot Motion Prediction (EBM) and Control (MPC)
RA-L 2025 [Code] [ROS 2] [Paper] [Video-Demo]
Future-Oriented Navigation: Dynamic Obstacle Avoidance with One-Shot Energy-Based Multimodal Motion Prediction | Autonomous Mobile Robot | Energy-Based Multimodal Motion Prediction
Efficient Obstacle Avoidance and Multi-Agent Coordination: DDPG-Boosted MPC for Collision-Free Navigation
IROS 2024 (Abu Dhabi, UAE) [Code] [Paper] [Video-Demo]
Bird’s-Eye-View Trajectory Planning of Multiple Robots using Continuous Deep Reinforcement Learning and Model Predictive Control | Deep Reinforcement Learning | Multi-Agent Coordination
Previous Work
Dynamic Obstacle Avoidance: Iterative Motion Prediction (SWTA) and Control (MPC)
RA-L 2023 - Yokohama, JPN (ICRA 2024) [Code] [Paper] [Video-Demo]
[Deprecation soon] Prescient Collision-Free Navigation of Mobile Robots With Iterative Multimodal Motion Prediction of Dynamic Obstacles | Autonomous Mobile Robot | Multimodal Motion Prediction

Dynamic Obstacle Avoidance: MDN Predictor and MPC
CASE 2021 (Virtual/Lyon, FR) [Code] [Paper] [Video-Demo]
Motion Prediction Based on Multiple Futures for Dynamic Obstacle Avoidance of Mobile Robots | Mixture Density Network